Medical robotics
The medical robotics theme focuses on the design, control, and sensing of advanced robotic systems for surgical applications across various medical domains, e.g., retinal surgery, neurosurgery, and cardiac surgery.
Our Capabilities
- Robotic design: Magnetic small-scale robots, Steerable robotic systems, and Parallel robotic manipulators for minimally invasive procedures.
- Robotic control: Autonomous navigation through learning-based control strategies, Robust motion control by modeling and identifying system parameters, and Adaptive responses to dynamic and deformable tissues using advanced control algorithms.
- Robotic sensing: Microscale tool-tissue interaction forces and soft robot deformation through embedded Fiber Bragg Grating (FBG) sensors, Robot localization within the body via custom-designed ultrasound image detection systems, and Robot state estimation using machine learning-based predictive models.
Example Projects
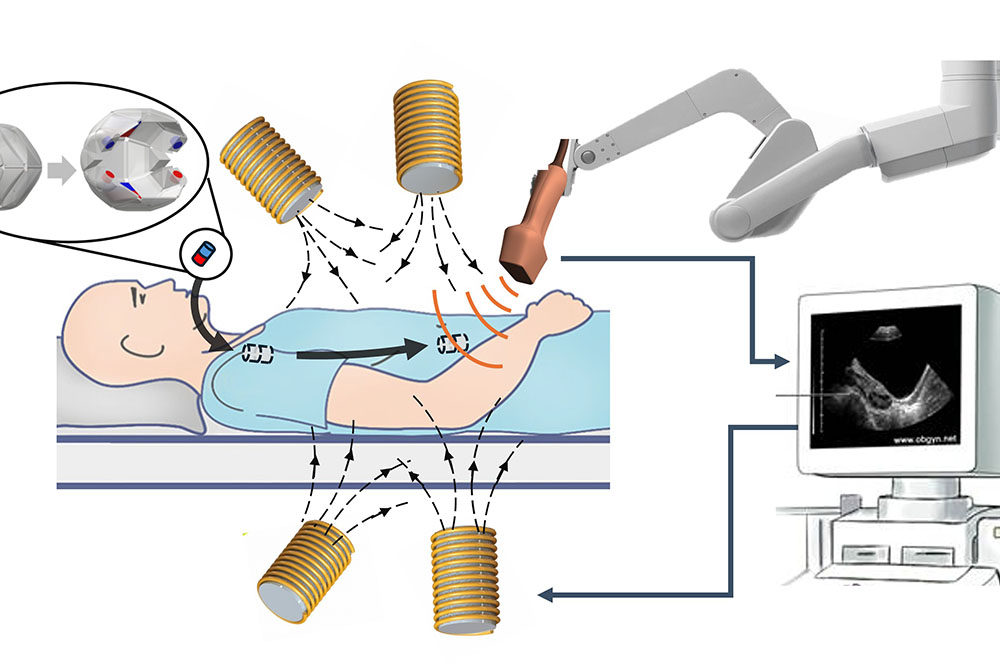
Magnetic Capsule Robot for Gastrointestinal Intervention
We are developing a magnetic capsule robotic system for minimally invasive procedures in the gastrointestinal (GI) tract. This compact capsule robot features magnetic propulsion, origami-inspired mechanical components, and ultrasound-based sensing to enable precise diagnostic and therapeutic interventions.
Intelligent robotic system for precise minimally invasive surgery
We are developing an intelligent robotic system that combines endoscopic image navigation, real-time force sensing using Fiber Bragg Grating (FBG) sensors, and learning-based control algorithms to improve motion precision, adapt to intraoperative changes, and support surgeons with intuitive, semi-autonomous manipulation.

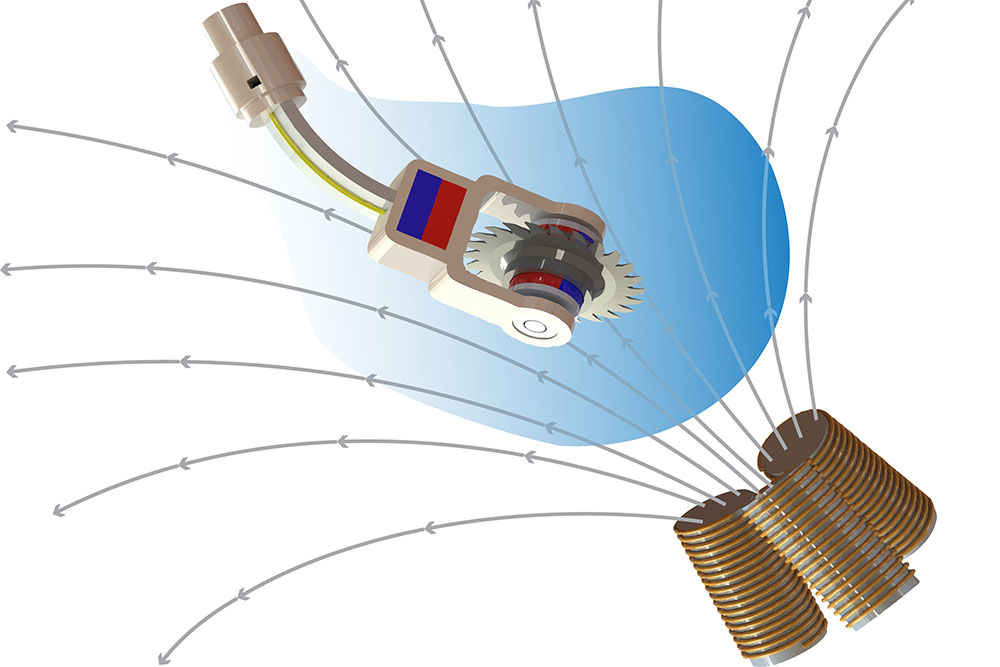
Magnetic Robotic Tools for Confined Environments
We are developing intelligent millimeter-scale robotic tools designed for high-precision tasks in confined environments. These wireless magnetic robots integrate adaptive magnetic actuation, fiber-optic sensing, and closed-loop control to enable autonomous manipulation in areas such as microsurgery, micro-assembly, and in-situ inspection. Our goal is to overcome key limitations in dexterity, feedback, and control, advancing the capabilities of small-scale robotics for real-world applications.
Collaborators
We partner with:
- Industry leaders: Beijing Xianwei Medical Tech
- National and international research institutes, including the Robotics Institute at the University of Toronto.
The University of Newcastle acknowledges the traditional custodians of the lands within our footprint areas: Awabakal, Darkinjung, Biripai, Worimi, Wonnarua, and Eora Nations. We also pay respect to the wisdom of our Elders past and present.